串口通信基本原理(51部分) (请说明串口通信的基本原理和过程)
串口通信基本原理(51部分) (请说明串口通信的基本原理和过程)
单片机采集或者处理的数据要与其他设备进行通讯,如果没有通信的话单片机只局限于本身,大大降低了了单片机功能,因此单片机通信至关重要。UART全称是Universal Asynchronous Receiver/Transmitter,也叫作通用异步收发传输器,是单片机常用的通信技术。在stm32单片机中我们也常能看到USART,全称是UniversalSynchronous Asynchronous Receiver/Transmitter,也叫作通用同步异步收发传输器,也就是说USART既可以用于同步串行通信,也能用于异步串行通信。
单片机通信方式按照基本类型可分为串口通信和并行通信。并行通信是指一次性传送全部数据位,速度快效率高,但是需要IO口多,传送距离短一般小于30m;串口通信是指数据位在一根数据线上依次发送或者接受,需要IO口少,虽然传送速度相对慢,但传送距离长且抗干扰能力强,因此串口通信得到了广泛应用。
串口通信有三种传送模式,单工模式、半双工模式、全双工模式。单工模式是指在通信双方中,一方只负责发送,另一方只负责接收。例如广播,喇叭只负责接受信号进行广播,不能发信号给设备另一端。半双工模式是指在通信双方中,一方在发送数据的过程中不能接受另一方传过来的数据,另一方在接受数据的过程中不能发送数据。例如常用的对讲机,在一方讲的过程中另一方只能听,只能等一方讲完了才能让另一方讲。全工模式是指在通信双方中,双方可以同时传送数据,比如人手一个的手机,可以边听边讲。
串行通信的格式说明
UART一般用于板间通信,即单片机和外围设备之间的通信。如图1所示,单片机1与单片机2的通信,单片机1的“TXD”与单片机2的“RXD”连接,单片机1的“RXD”与单片机2的“TXD”连接,为了保持基准一致需要同接一个GND。
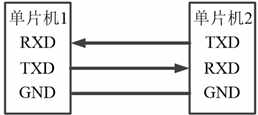
图1 单片机与单片机通信示意图
设要传输一个字节“11001010”的数据,如图2所示,首先发送一个起始位“0”,再从低位到高位依次发送“0”“1”“0”“1”…“1”“1”,最后发送一个停止位“1”,表示发送完成。接收方收到“0”时准备接收数据,检测到停止位“1”时表示这个字节接收完毕。
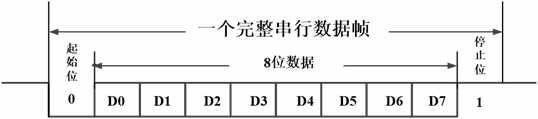
图2 串口发送示意图
波特率(baud)定义是每秒传输二进制数码的位数。例如,配套的开发板实验中采用的是波特率是2400bps,表示每秒可以传送2400个二进制位。注:根据单片机选用的晶振选择合适的波特率:在51单片机中晶振是12M,则用2400bps;单片机晶振是11.0592M,则可以使用多种速率的波特率,常用的是9600bps。
以上就是(串口通信基本原理(51部分) (请说明串口通信的基本原理和过程))全部内容,收藏起来下次访问不迷路!